Cadre
 Ce simulateur de conduite a été développé dans le cadre du projet de recherche "Défauts d’Attention et COnduiTe Automobile AR5 : de l’attention à la prise de décision" (Dacota - AR5).
Ce simulateur de conduite a été développé dans le cadre du projet de recherche "Défauts d’Attention et COnduiTe Automobile AR5 : de l’attention à la prise de décision" (Dacota - AR5).
Cette action de recherche vise à examiner les effets d’une modification de la charge attentionnelle sur les processus d’anticipation et de prise de décision en situation de conduite automobile. La prise de décision est basée à la fois sur une intégration des entrées sensorielles (perception de l’environnement), sur l’interprétation qui en est faite (elle-même fonction des connaissances du sujet), ainsi que sur des aspects liés à l’état du sujet (vigilance, émotion, objectifs, attentes du sujet, …).
Au contraire des études classiques en psychologie cognitive, l’idée est de plonger le sujet dans une situation écologique. La situation retenue est celle d’une tâche de conduite automobile en milieu urbain dans un paradigme de double tâche (conduire et écouter une émission radio). Afin de satisfaire aux contraintes d’expérimentation d’une étude MEG (magnétoencéphalographie), il a été nécessaire de mettre en oeuvre un simulateur de conduite spécifique (Dacota 3D).
Le travail de l'ISH a constitué à définir et mettre en place l'environnement virtuel de simulation (Dacota 3D) servant de base à l'expérimentation.
Le simulateur
 À proprement parler, Dacota 3D n'est pas un véritable simulateur de conduite, mais s'apparente plutôt à un jeu basique de conduite automobile. C'est pour cela que nous parlons plus d'un environnement de simulation que d'un simulateur de conduite.
À proprement parler, Dacota 3D n'est pas un véritable simulateur de conduite, mais s'apparente plutôt à un jeu basique de conduite automobile. C'est pour cela que nous parlons plus d'un environnement de simulation que d'un simulateur de conduite.
Ce qui distingue un véritable simulateur de conduite d'un jeu de voiture repose non seulement sur la qualité de la restitution de l'environnement (décors, comportement des autres véhicules, personnages, environnement lumineux, etc.) mais aussi et surtout sur la qualité du modèle de conduite et des effets physiques. C'est-à-dire que le simulateur doit donner véritablement l'impression d'être au volant d'un réel véhicule. Dans un véritable simulateur de conduite, deux éléments sont importants :
- La restitution pleine échelle : c'est à dire immerger le conducteur dans un environnement en tout point identique à la situation de conduite. Cela implique donc la restitution de l'habitacle, la restitution des effets d'accélération et de roulis, la restitution de l'environnement visuel et sonore, mais aussi les éléments connexes comme la température, hygrométrie de l'air, les odeurs, etc..
- Le modèle physique du véhicule : c'est à dire reproduire le plus fidèlement possible le comportement de véhicule. Cela implique de modéliser complètement la physique du véhicule (cinétique, dynamique, etc.) et sa réaction à l'environnement (inertie, dynamique de l'adhérence suivant les types de sol, interactions/chocs potentiels avec les autres objets, etc.).
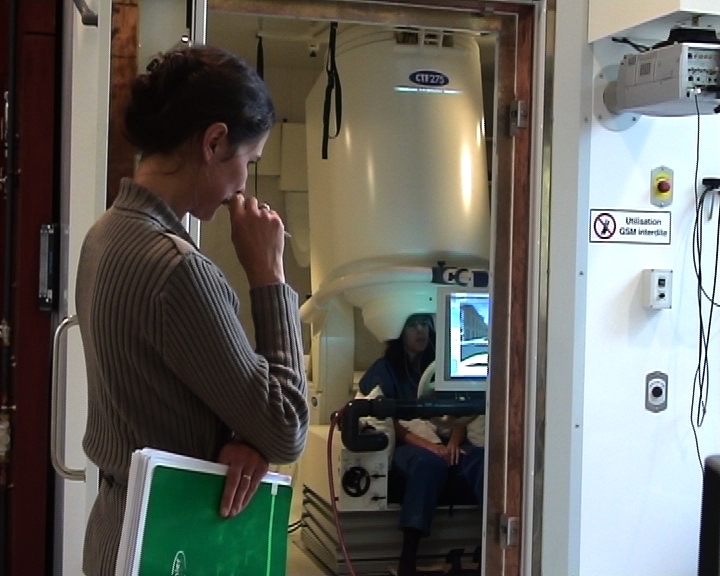
Dans le contexte de la MEG, il était impossible d'utiliser un simulateur pleine échelle ou qui s'en rapprocherait pour cette expérimentation. En effet, la MEG (magnétoencéphalographie) est une technique d'observation des activités du cerveau qui repose sur la mesure des champs magnétiques induits par l'activité des neurones. Pour permettre cette mesure, le sujet doit placer sa tête dans une cavité sur laquelle sont répartis environ 250 capteurs. L'activité magnétique des neurones étant très faible, il faut minimiser toutes les sources potentielles de magnétisme, le magnétoencéphalographe est donc placé dans une pièce isolée magnétiquement (cage de faraday) dans laquelle aucun métal ne doit être présent. Les contraintes pour le simulateur ont été :
- L'impossibilité d'utiliser du métal a obligé la conception d'un volant et de pédales uniquement en plastique (conception par Claude Delpuech).De ce fait, la dynamique de mouvement avait un temps de réaction plus faible qu'un volant réel.
- Il fallait éviter que le sujet ne bouge la tête, ni ne tourne trop souvent son regard afin de ne pas perturber les mesures. Il fallait donc réduire le champ visuel du sujet, en évitant qu'il ne cherche à regarder des éléments périphériques (notamment absence de rétroviseur, et donc impossibilité de reculer).
- Par ailleurs, afin de consolider les mesures, il fallait des situations quasi identiques pour reproduire les mesures.
Pour cela, nous avons donc composé une scène visuelle globalement uniforme dont les principaux stimulus se trouvent proches du centre de l'écran et nous avons adapté le modèle physique du véhicule à la maniabilité imposé par le volant.
Équipes pour la réalisation du simulateur
- Gérald Foliot : développement du simulateur.
- Nicolas El-Sayegh : 3D design & exploration techniques.
- Didier Leblanc : réalisation des films.
Équipes de recherche impliquées dans le projet Dacota A5 de l’attention à la prise de décision
- CRIS-LEACM : Laboratoire d'Etude et d'Analyse de la Cognition et des Modèles sous équipe du laboratoire CRIS (laboratoire rataché à l'Université Lyon1).
- CERMEP : Centre d'Exploration et de Recherche Médicales par Émission de Positons.
- ISH : Institut des Sciences de l'Homme (unité de service rattaché au CNRS / Université Lyon2, ENS-LSH).
- LESCOT : Laboratoire Ergonomie et Sciences Cognitives pour les Transports. Laboratoire rataché à l'INREST (Institut National de Recherche sur les Transports et leur Sécurité).
- MMB : Microcapteurs et Microsystèmes biomédicaux - équipe de l'INL (Institut des Nanotechnologies de Lyon).
- U821 : Dynamique Cérébrale et Cognition. Unité de recherche ratachée à l'INSERM (Institut national de la santé et de la recherche médicale).