Vor Zurück Inhalt
8. Weiterentwicklung und Implementation von Todas Modell
In den letzten Jahren ist das Interesse an Todas theoretischem Ansatz wieder erwacht. Das zeigt sich unter anderem auch an der Häufigkeit, mit der er, beispielsweise von Autoren wie Frijda, Pfeifer oder Dörner, zustimmend zitiert wird.
Die vermehrte Rezeption von Toda koinzidiert mit einem erstarkten Interesse an der Konstruktion realer autonomer Agenten. In diesem Zusammenhang hat es mehrere Ansätze gegeben, Todas Modell anhand aktueller Ergebnisse aus der Emotionspsychologie zu modifizieren und teilweise in eine Computer- bzw. Robotersimulation umzusetzen. Die Arbeiten von Aubé, Wehrle, Pfeifer und Dörner et al. werden im Folgenden kurz vorgestellt.
8.1. Die Modifikation von Todas urges durch Aubé
Michel Aubé hat die Probleme aufgezeigt, die das System von Todas urges aufweist (Aubé, 1998). Zum einen kritisiert er Todas Klassifikation der urges: So findet sich dort grief zum Beispiel unter den rule-observance urges. Zum anderen stellt er fest, daß Toda eine Reihe von urges mit zu den Emotionen zählt, die man eher als Bedürfnis (need) bezeichnen würde (z.B. Hunger). Schließlich merkt er an, daß einige der urges eher das darstellen, was Frijda action tendencies nennt und nicht die Emotionen selbst, zum Beispiel rescue oder demonstration.
Aubé schlägt daher vor, zunächst einmal auf die Definition der urges als Emotionen zu verzichten, sondern sie eher als Motive zu begreifen. Diese Motive differenziert Aubé in zwei Klassen: Bedürfnisse wie Hunger oder Durst stellen eine motivationale Kontrollstruktur dar, die den Zugang zu und das Management von Ressourcen erster Ordnung ermöglichen. Emotionen wie Ärger oder Stolz sind motivationale Kontrollstrukturen, die Ressourcen zweiter Ordnung schaffen, fördern oder schützen. Solche Kontrollstrukturen zweiter Ordnung sind für Aubé soziale Verpflichtungen (commitments).
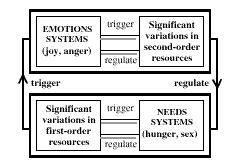
Abb. 6: Zwei Kontrollschichten für das Management von Ressourcen (Aubé, 1998, S. 3)
Commitments sind für Aubé der zentrale Faktor bei Emotionen:
Innerhalb autonomer Agenten stellen commitments dynamische Einheiten dar, aktive Subsysteme, die nach signifikanten Ereignissen Ausschau halten, welche für ihre Erfüllung oder Verletzung von Bedeutung sind. Sie registrieren als Variablen zum Beispiel wer wem (to whom) verpflichtet ist, bis wann (until when) und weshalb (about what).
Aubé hat eine generelle Aufrufmatrix für grundlegende Klassen von Emotionen entwickelt, indem er die Ansätze von Weiner und Roseman miteinander vereint. Er ordnet Todas social urges in diese Matrix ein.
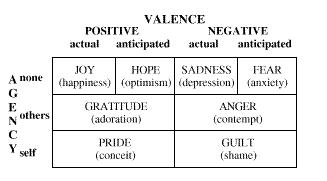
Abb. 7: Aufrufstruktur für grundlegende Emotionen (Aubé, 1998, S.4)
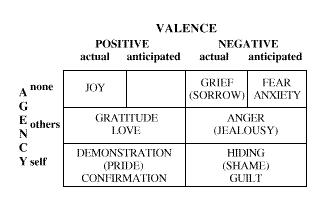
Abb. 8: Zuordnung von Todas urges zur Aufrufstruktur für grundlegende Emotionen (Aubé, 1998, S. 5)
Aubé kommt zu dem Schluß, daß seine modifizierte Version von Todas urges übereinstimmt mit wesentlichen Theorien der Motivation und seiner Theorie von emotions-as-commitment-operators. Eine solche Kontrollstruktur ist für ihn eine wesentliche Voraussetzung, um kooperative adaptive Agenten zu konstruieren, die sich in einer komplexen sozialen Umwelt selbständig bewegen können.
8.2. Die teilweise Implementation von Todas Theorie durch Wehrle
Wehrle hat die Grundelemente von Todas sozialem Fungus Eater in ein konkretes Computermodell umgesetzt (Wehrle, 1994). Als Rahmen dafür diente ihm das Autonomous Agent Modeling Environment (AAME). Das AAME wurde speziell entwickelt, um psychologische und kognitionswissenschaftliche Theorien von Agenten in konkreten Umwelten zu erforschen. Zu AAME gehört eine objektorientierte Simulationssprache, mit der komplexe Mikrowelten und autonome Systeme modelliert werden können. Des weiteren gehört zum System eine Reihe interaktiver Simulationsinstrumente, mit denen die Inspektion und Manipulation aller Objekte des Systems während der Ausführung möglich ist.
Für die konkrete Implementation von sozialen Fungus-Eaters waren einige zusätzliche Annahmen nötig, die sich so bei Toda nicht finden: Sie halten einen bestimmten Abstand zueinander ein, um Konflikte um Essensfunde oder ineffektives Erzeinsammeln zu vermeiden. Auf der anderen Seite halten sie untereinander losen Kontakt, um sich im Notfall gegenseitig helfen zu können.
Anstelle von vorprogrammierten urges verwendet Wehrles Modell einen kybernetischen Regelkreis, in dem der Energiehaushalt eines Agenten mit hedonistischen Elementen verknüpft ist.
Das Modell des sozialen Fungus Eaters sieht insgesamt wie folgt aus:
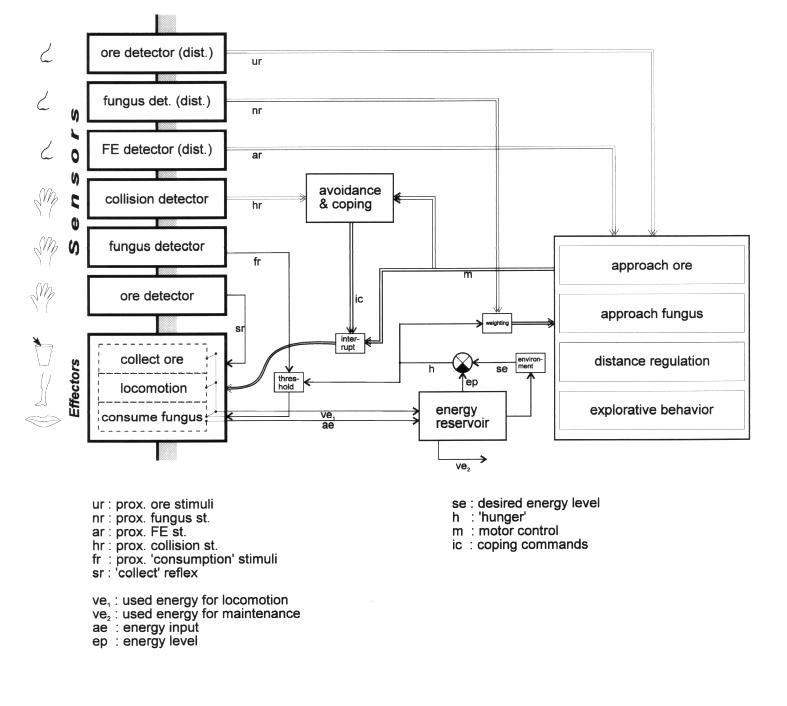
Abb. 9: Modell eines sozialen Fungus Eater (Wehrle, 1994)
Das emergente Verhalten der Agenten in seinem Modell beschreibt Wehrle so:
| Agenten halten sich zumeist an Nahrungsquellen oder Erzfundstellen auf. | |
| An den Nahrungsquellen gibt es eine gleitende Veränderung der Agentenzusammensetzung. | |
| Agenten mit ähnlichem Hungerwert bilden Gruppen von 2 bis 5 Mitgliedern. | |
| Die Gruppen lösen sich auf, wenn die Agenten ein bestimmtes Energieniveau wieder aufgefüllt haben oder andere Agenten zur Nahrungsquelle kommen. | |
| Ausgesprochen hungrige Agenten schieben weniger hungrige Agenten beiseite und zeigen andere Arten von unsozialem Verhalten. |
Sicherlich ist diese Implementation nur ein kleiner erster Schritt, ein autonomes System nach Todas Prinzipien auch tatsächlich zu entwickeln. Sie zeigt jedoch, daß es grundsätzlich möglich ist und daß sich bereits bei einer sehr restriktiven Umsetzung erste emergente Effekte zeigen.
8.3. Pfeifers "Fungus-Eater-Prinzip"
Pfeifer hat auf Grundlage des von Toda entwickelten Modells in einer Reihe von Arbeiten die Konstruktion von autonomen Agenten nach dem Fungus- Eater-Prinzip beschrieben (Pfeifer, 1994, 1996).
Ausgangspunkt war für ihn der nur teilweise Erfolg seines Modells FEELER (s.o.) sowie anderer Versuche der "klassischen" AI, Computermodelle für Emotionen zu entwerfen. Insgesamt nennt er sechs Kritikpunkte an solchen Modellen:
- Die Annahme Emotionen seien isolierbare Phänomene: Zum einen liefert dies eine Reihe von Fehlerquellen, weil es keine allgemein akzeptierte Definition von "Emotion" gibt. Zum anderen wird "emotionales Verhalten" über Regeln fest in das System einprogrammiert; emergentes Entstehen von Emotionen ist somit nicht möglich. Vieles deutet aber darauf hin, daß Emotionen emergente Phänomene sind, die vom Gesamtsystem eines Agenten nicht zu trennen sind.
- Das Referenz-Problem (frame-of-reference): Die in der AI typischerweise eingesetzten Modelle sind intentionaler Natur, das heißt, sie arbeiten mit Zielen, Wissen, Überzeugungen. Diese Modelle sagen uns nichts über die einer Emotion zugrundeliegenden Mechanismen, da sie post hoc entstandene Rationalisierungen sind. Damit sind sie vom Beobachter ausgehende Attributionen und keine Abbilder der Emotionsmechanismen.
- Einbettung in eine wirkliche Welt (situatedness): Das Wissen, wie ein Agent in einer bestimmten Lebenssituation zu reagieren hat, ist nicht ein- für allemal abgespeichert, sondern wird immer wieder neu in solchen Situationen generiert. In einer unsicheren, sich schnell verändernden und unvorhersagbaren Umwelt ist es nicht möglich, Lösungen für alle Probleme von Anfang an im System zu speichern.
- Körperlichkeit (embodiment): Die meisten AI-Modelle arbeiten ausschließlich mit der Simulation im Rahmen eines Softwaremodells. Lebensechte Agenten haben aber einen Körper und bewegen sich damit in ihrer Welt. Die Fähigkeit, durch einem Körper mit der Welt interagieren zu können, generiert völlig neue Lern- und Problemlösungseffekte, die aus einer reinen Softwaremodellierung nicht ableitbar sind.
- Begrenzte Aufgaben: AI-Modelle konstruieren ihre Agenten für eine eng definierte Aufgabe. (Bei FEELER war es eine emotionsauslösende Situation in einem Flugzeug.) Dies hat mit der wirklichen Welt nichts zu tun, in der ein Agent stets mehrere Aufgaben ausführen muß und zwar oft aus unterschiedlichen Problembereichen. Ein komplettes autonomes System benötigt daher Vorrichtungen, um mit der wirklichen Welt interagieren zu können und Mechanismen, die es ihm ermöglichen, wirklich autonom zu handeln.
- Überdesign: Scheinbare Komplexität im beobachtbaren Verhalten bedeutet nicht zwangsläufig eine ebensolche Komplexität im zugrundeliegenden Design. Das hat bereits Braitenberg mit seinen Vehicles demonstriert (Braitenberg, 1990). Die meisten AI-Modelle tendieren dazu, komplexe statt einfache Lösungen zu implementieren, weil sie einen Top-Down-Ansatz wählen, der von Hypothesen über einen Mechanismus ausgeht, ohne diesen sich im Agenten selbst entwickeln zu lassen.
Pfeifers Fungus-Eater-Prinzip geht davon aus, daß Intelligenz und Emotionen Eigenschaften "kompletter autonomer Systeme" sind. Deshalb geht es ihm darum, solche Systeme zu entwerfen. Damit wird auch vermieden, eine fruchtlose Debatte über Emotionen und ihre Funktion zu führen:
Das Fungus-Eater-Prinzip bedeutet zugleich, daß man einen entsprechend konstruierten Agenten über einen längeren Zeitraum beobachten muß, um zu sehen, welche Verhaltensformen unter welchen Bedingungen entstehen.
Aufbauend auf diesen Ausführungen, hat Pfeifer zwei Modelle eines autonomen Fungus Eater entwickelt: einen Learning Fungus Eater mit physischer Implementation sowie einen Self-sufficient Fungus Eater als reine Software-Simulation.
Der Learning Fungus Eater ist ein kleiner Roboter, ausgerüstet mit drei Arten von Sensoren: proximity sensors ermitteln die Entfernung zu einem Hindernis (hohe Aktivierung bei Nähe, niedrige bei Distanz); collision detectors werden bei Kollisionen aktiviert; target sensors können ein Ziel entdecken, wenn sie sich innerhalb eines bestimmten Radius um das Ziel herum befinden. Der Roboter verfügt über zwei Räder, die unabhängig voneinander über zwei Motoren angetrieben werden.
Der Learning Fungus Eater verfügt über zwei Reflexe: collision-reverse-turn und if-target-detected-turn-towards-center-of-target. Die Kontrollarchitektur besteht aus einem neuronalen Netz, das zum Teil durch Hebb'sches Lernen verändert werden kann:
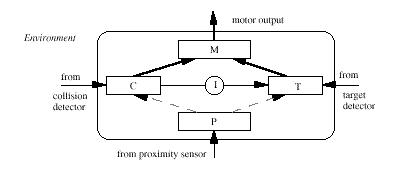
Abb. 10: Kontrollarchitektur des Learning Fungus Eater (Pfeifer, 1994, S. 10)
Das gesamte Kontrollsystem besteht aus vier Schichten: dem collision layer, dem proximity layer, dem target layer und dem motor layer. Die einzige Aufgabe des Roboters ist es, sich fortzubewegen. Seine Umwelt sieht wie folgt aus:
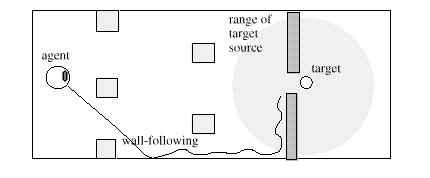
Abb. 11: Umwelt des Learning Fungus Eater (Pfeifer, 1994, S.10)
Was passiert nun, wenn der Roboter aktiviert wird? Zunächst wird er gegen Hindernisse prallen. Jede reverse-and-turn-Aktion macht Hebb'sches Lernen zwischen dem proximity layer und dem collision layer möglich, bis der Roboter gelernt hat, Hindernissen auszuweichen. Von außen sieht es so aus, als könne der Roboter Hindernisse antizipieren. Pfeifer weist darauf hin, daß üblicherweise für ein solches "antizipierendes" Verhalten eine Architektur mit mehreren Schichten vorgeschlagen wird, während tatsächlich eine Schicht ausreicht. Pfeifer erläutert zwei weitere Phänomene des Roboters:
Das zeige deutlich, so Pfeifer, daß ein System ohne Strategien, ohne Antizipationsmechanismus, ohne Wissen über Nahrungsquellen ein Verhalten zeigen könne, das von Beobachtern als zielgerichtet und motiviert eingestuft wird - welches aber lediglich aus der Interaktion des Systems mit seiner Umwelt resultiere.
Der Learning Fungus Eater ist insofern kein komplettes autonomes System, als er sich nicht selbst versorgen kann. Deshalb hat Pfeifer den Self-sufficient Fungus Eater entwickelt, zunächst allerdings nur als Software-Simulation.
Der Agent befindet sich in diesem Fall in einer Toda'schen Landschaft mit Pilzen als Nahrung und Erz zum Abbauen. Die Handlungsauswahl ist hier deutlich komplizierter: der Agent kann explorieren (nach Erz oder Nahrung suchen), er kann essen oder Erz sammeln. Was er tut, wird von den zentralen Variablen "Energieniveau" und "gesammelte Erzmenge" bestimmt. Für die Handlungsauswahl in jeder gegebenen Situation verfügt der Agent nur über eine einzige Regel: "If the agent is exploring and energy level is higher than amount of ore collected per unit time, it should ignore fungus (but should not ignore ore), if not it should ignore ore (but should not ignore fungus)." (Pfeifer, 1994, S. 12)
Auch hier ist, so Pfeifer, für Beobachter das Resultat ein Zustand, dem sie eine hohe emotionale Intensität zuschreiben:
Pfeifer schränkt im selben Aufsatz ein, daß diese wenigen Befunde natürlich nicht erklären könnten, was Emotionen nun wirklich seien. Er verspricht sich allerdings von der Weiterverfolgung dieses Ansatzes, auch wenn das sehr zeitintensiv sei, mehr als von Computermodellen, die ein isoliertes Emotionsmodell zum Gegenstand haben.
8.4. Der Ansatz von Dörner et al.
Dörner hat ein Computermodell entwickelt, das kognitive, motivationale und emotionale Prozesse integriert (Dörner et al., 1997; Dörner und Schaub, 1998; Schaub, 1995, 1996): das PSI-Modell der Absichtsregulation. Im Rahmen von PSI ist das Modell "EmoRegul" entwickelt worden, das emotionale Prozesse besonders berücksichtigt.
PSI ist Teil eines theoretischen Ansatzes, den Dörner "synthetische Psychologie" nennt. Dieser Ansatz versucht zu analysieren, wie psychische Prozesse als Prozesse der Informationsverarbeitung aussehen, indem diese psychischen Prozesse konstruiert werden. Dörners Ansatzpunkt ist dabei ähnlich wie der von Toda, wenn er schreibt, "..daß man in der Psychologie die verschiedenen psychischen Prozesse nicht ungestraft in ihre Bestandteile zerlegen darf" (Dörner und Schaub, 1998, S.1).
Kern des PSI-Modells ist das Konzept der "Absicht". Schaub definiert Absicht als internen psychologischen Prozeß,
Die PSI-Agenten sind als Dampfmaschinen konzipiert, die sich in einer simulierten Umgebung mit Wasserstellen, Benzinstationen, Steinbrüchen usw. bewegen. Um sich weiterhin bewegen zu können, benötigen die Agenten sowohl Benzin als auch Wasser, die aber an unterschiedlichen Stellen zu finden sind.
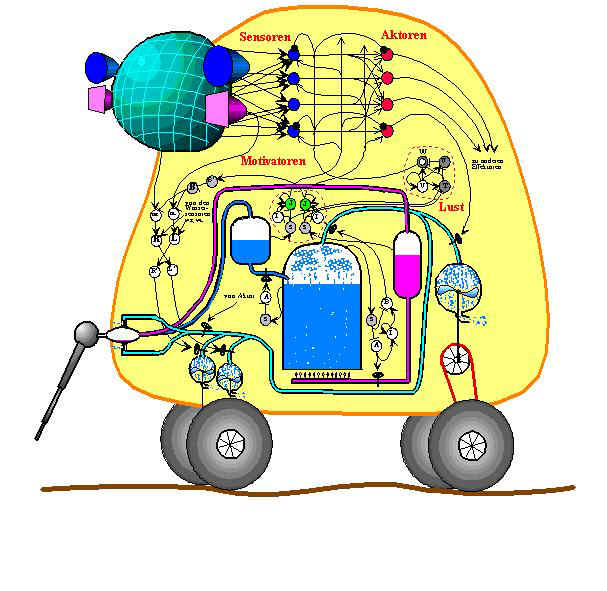
Abb. 12: Schematischer Aufbau des PSI-Systems (Dörner und Schaub, 1998, S. 7)
Ein PSI-Agent verfügt über eine Reihe von Bedürfnissen, die in zwei Klassen aufgeteilt sind: materielle Bedürfnisse und informationelle Bedürfnisse. Zu den materiellen Bedürfnissen zählen die Aufnahme von Treibstoff und Wasser sowie die Vermeidung von gefährlichen Situationen (z.B. Steinschlag). Zu den informationellen Bedürfnissen zählen Bestimmtheit (eine Erwartung wird erfüllt) und Unbestimmtheit (eine Erwartung wird enttäuscht), Kompetenz (Erfüllung von Bedürfnissen) und Affiliation (Bedürfnis nach sozialen Kontakten).
Mangelzustände kann man sich in PSI wie ein Gefäß vorstellen, dessen Inhalt einen gewissen Schwellenwert unterschritten hat. Die Differenz zwischen Ist- und Soll-Zustand bezeichnet Dörner als Bedarf. "Ein Bedürfnis signalisiert also, daß ein Bedarf eines bestimmten Ausmaßes vorhanden ist." (Dörner und Schaub, 1998, S. 10)
Ein solcher Mangelzustand aktiviert einen Motivator, dessen Aktivierungsgrad um so höher ist, desto größer die Sollwertabweichung ist und desto länger sie schon andauert. Der Motivator versucht nun, die Handlungssteuerung zu übernehmen, um diesen Zustand durch eine konsummatorische Endhandlung zu beseitigen. Zu diesem Zweck wird ein Ziel angestrebt, das dem Motivator aus vergangenen Erfahrungen bekannt ist.
Mit Zielen entstehen in PSI auch Motive, die Instanzen darstellen, welche ein Handeln in Gang setzen, auf ein bestimmtes Ziel ausrichten und bis zur Zielerreichung aufrechterhalten.
Da stets mehrere Motivatoren miteinander um die Handlungsleitung wetteifern, verfügt das System über einen Motivselektor, der mit Hilfe einer schnellen Erwartungs x Wert-Kalkulation entscheidet, welcher Motivator die größte Motivstärke besitzt und damit den Vorzug erhalten soll. Der Wert eines Motivators bestimmt sich aus seiner Wichtigkeit (Größe der Sollwertabweichung) und Dringlichkeit (verfügbare Zeit bis zur Beseitigung des Sollzustands); die Erwartung bestimmt sich aus der Fähigkeit des Agenten, dieses Bedürfnis tatsächlich zu befriedigen (Erfolgswahrscheinlichkeit).
PSI verfügt auch über ein Gedächtnis, das aus sensorischen und motorischen "Schemata" besteht. Sensorische Schemata repräsentieren das Wissen des Agenten über seine Umgebung; motorische Schemata sind Verhaltensprogramme. Dabei gibt es in PSI keine Unterscheidung zwischen unterschiedlichen Gedächtnisarten.
Die Handlungssteuerung in PSI geschieht über Absichten, die operational als Kombination des ausgewählten Motivs mit den Informationen, die mit dem aktiven Motivator im Gedächtnisnetzwerk verknüpft sind, definiert werden. Diese Informationen betreffen die anzustrebenden Ziele, die anzuwendenden Operatoren oder Aktionsschemata, das Wissen über die vergangenen, vergeblichen Ansätze zur Problemlösung sowie die Pläne, die PSI mit Hilfe heuristischer Verfahren erzeugt. Alle diese Informationen bestehen aus neuronalen Netzen; eine Absicht als Bündelung all dieser Informationen stellt das Arbeitsgedächtnis von PSI dar.
Die zentralen Mechanismen der Gefühlsregulation in PSI sind die Motivatoren für Bestimmtheit und Kompetenz, also zwei informationelle Bedürfnisse. Aktive Bestimmtheits- oder Kompetenzmotivatoren lösen bestimmte Aktionen aus oder steigern die Bereitschaft dazu:
Emotionen entstehen bei PSI also nicht in einem eigenen Emotionsmodul, sondern als Folge von Regelprozessen eines homöostatischen Systems. Schaub drückt es so aus: "Was wir beim Menschen als Emotionen bezeichnen, ist die Art und Weise der Handlungsorganisation, verbunden mit zugehörigen Motivationen." (Schaub, 1995, S. 6)
Dabei räumt Dörner ein, daß eine Vielfalt von Emotionen in PSI noch nicht darstellbar seien, weil dem System ein Modul zur Selbstbeobachtung und Selbstreflexion fehlt. Dies sei jedoch nur eine Frage der verfeinerten Implementation des Modells und damit kein prinzipielles Problem.
Dörners Modell weist eine Reihe von Ähnlichkeiten mit anderen Modellen auf. Wie Toda und Pfeifer ist sein Ansatzpunkt der, ein komplettes autonomes System ohne separates Emotionsmodul zu konstruieren. Wie Frijda und Moffat enthält PSI einen zentralen Speicher, der allen Modulen jederzeit zum Auslesen und zum Modifizieren zugänglich ist:
PSI arbeitet nicht mit expliziten Regeln, sondern ist ein teilweise konnektionistisches System, das Emotionen durch Selbstorganisation produziert.
8.5. Zusammenfassung und Bewertung
Die Modellansätze von Pfeifer und Wehrle zeigen deutlich, welche Bedeutung Todas Theorie für die Konstruktion autonomer Agenten besitzt, die ohne die Kontrollfunktion der Emotionen nicht überleben könnten. Anstelle von vordefinierten und fest im Modell verankerten Emotionstaxonomien wählen beide Autoren den entgegengesetzten Ansatz: Ihre Modelle enthalten nur die allernötigsten Anweisungen für den Agenten.
Während Wehrle bestimmte Ereignisse noch mit hedonistischen Komponenten verknüpft, verzichtet Pfeifer ganz darauf. Im Resultat zeigen beide Systeme ein Verhalten, das von einem Außenstehenden als "emotional" interpretiert werden kann.
Beide Modelle haben den Nachteil, daß sie noch nicht allzu viel über Emotionen in Computeragenten aussagen - dazu ist ein längerer Beobachtungszeitraum notwendig, in dem die Agenten sich entwickeln können. Dadurch wird zwar das Problem vermieden, Emotionen willkürlich in ein System hineinzuprogrammieren; andererseits wird eine neue Diskussionsfront darüber eröffnet, ob ein Verhalten, das einem Beobachter als emotional erscheint, auch tatsächlich emotional ist. Hier bewegt sich die Argumentation wieder deutlich in den philosophischen Bereich hinein.
Beide Ansätze denken die Annahme von Emotionen als emergenten Phänomenen konsequent zu Ende - mit allen Vor- und Nachteilen, die sich daraus ergeben.
Aubés Versuch, Todas urges mit seinem theoretischen Emotionsmodell zu verknüpfen, birgt seine eigenen Probleme in sich. Richtig erkennt er eine Reihe von Inkonsistenzen in Todas urges-Modell und versucht, diese zu beseitigen. Dabei stellt er allerdings seine eigene Definition von Emotionen als sozialen Phänomenen in den Vordergrund. Aubés Verschmelzung von Weiners und Rosemans Theorien, die er sodann erneut mit seinem und Todas Ansatz zu einer Einheit zusammenfaßt, wirft grundsätzliche Probleme auf, für deren Diskussion an dieser Stelle der Raum fehlt.
Das Modell von Dörner schließlich ist in vielen Beziehungen den Ansätzen von Pfeifer und Wehrle (und damit Toda) ähnlich: Emotionen werden als Kontrollfunktionen in einem autonomen System begriffen. Dörner verknüpft diesen Ansatz mit einem homöostatischen Regulierungsmodell. Auch Dörner definiert Emotionen nicht explizit; emotionales Verhalten entsteht aufgrund der Veränderung zweier Parameter, die er "Bestimmtheit" und "Kompetenz" nennt. Insofern wird auch in diesem Fall emotionales Handeln dem System nur von außen zugeschrieben. Auch Dörner betrachtet Emotionen als emergente Phänomene, die nicht als separates Modul in ein System integriert werden müssen. Es bleibt abzuwarten, in welcher Richtung sich PSI (und damit Dörners Emotionsmodell) entwickelt, wenn das System ein Selbstbeobachtungsmodul erhält.