|
|
Next Previous Table of content
9. The philosopher from Birmingham
Aaron Sloman, professor
of philosophy at the School of Computer Science of the University of
Birmingham, counts certainly as one of the most influential theoreticians
regarding computer models of emotions. In an article from 1981 titled "Why robots will have
emotion" he stated:
Like Bates, Reilly or Elliott,
Sloman also represents the broad and shallow approach. For him,
it is more important to develop a complete system with little depth
than individual modules with much depth. It is his conviction that only
in this way a model can be developed which reflects reality to some
extent realistically. Sloman and his coworkers
in the Cognition and Affect Project
have, since 1981, published a lot of works on the topic
"intelligent systems with emotions", which can be divided roughly
into three categories:
To understand Sloman's
approach correctly, one must see it in the context of his epistemological
approach which is not concerned primarily with emotions, but with the
construction of intelligent systems. I shall try to sketch
briefly the core thoughts of Sloman's theory because they form the basis for
the understanding of the "libidinal computer" developed by Ian
Wright (see below). 9.1.
Approaches to the construction of intelligent systems
Sloman's interest lies
not primarily in a simulation of the human mind, but in the development of a
general "intelligent system", independent from its physical
substance. Humans, bonobos, computers and extraterrestial beings are
different implementations of such intelligent systems - the underlying
construction principles are, however, identical. Sloman divides the
past attempts to develop a theory about the function modes of the human
mind (and thus of intelligent systems generally) into three large groups:
Semantics-based, phenomena-based and design-based. Semantics-based approaches
analyze how humans describe psychological states and processes, in order
to determine implicit meanings which are the basis of the use of words
of everyday language. Among them he ranks, among others, the approaches
of Ortony, Clore and Collins as well as of Johnson-Laird and Oatley.
Sloman's argument against these approaches is: "As a source of
information about mental processes such enquiries restrict us to current
`common sense´ with all its errors and limitations." (Sloman, 1993,
p. 3) Some philosophers
who examine concepts analytically, produce, according to Sloman, semantics-based
theories, too. What differentiates them from the psychologists, however,
is the fact that they do not concentrate on existing concepts
alone, but are often more interested in the quantity of all possible
concepts. Phenomena-based approaches
assume that psychological phenomena like "emotion", "motivation"
or "consciousness" are already clear and that everybody can
intuitively recognize concrete examples of them. They try therefore
only to correlate measurable phenomena arising at the same time (e.g.
physiological effects, behaviour, environmental characteristics) with
the occurrence of such psychological phenomena. These approaches, argues
Sloman, can be found particularly with psychologists. His criticism
of such approaches is:
Design-based approaches
transcend the limits of these two approaches. Sloman refers here expressly
to the work of the philosopher Daniel Dennett who essentially shaped the debate around intelligent systems
and consciousness. Dennett differentiates
between three approaches if one wants to make forecasts about an entity:
physical stance , design stance and intentional stance
. The physical stance is "simply the standard laborious
method of the physical sciences" (Dennett, 1996, p. 28); the design
stance, on the other hand, assumes "that an entity is designed
as I suppose it to be, and that it will operate according to that design"
(Dennett, 1996, p. 29). The intentional stance which can be regarded
according to Dennett also as a"sub-species" of the design
stance, predicts the behaviour of an entity, for example of a computer
program, "as if it were a rational agent" (Dennett,
1996, p. 31). Representatives of the
design-based approach proceed from the position of an engineer who tries to
design a system that produces the phenomena to be explained. However, each
design does not require at the same time also a designer:
A design is, strictly
taken, nothing else than an abstraction which determines a class of possible
instances. It does not have to be necessarily concrete or materially
implemented - although its instances can quite have a physical form. For Sloman, the term
"design" is closely linked with the term "niche".
A niche is also a not a material
entity and no geographical region. Sloman defines it in a broad sense
as a collection of requirements to a functioning system. Regarding the development
of intelligent agents in AI, design and niche play a special role. Sloman
speaks of design-space and niche-space . A genuinely intelligent
system will interact with its environment and will change in the course
of its evolution. Thus it moves on a certain trajectory through
design-space . With it corresponds a certain trajectory through
the nichespace , because through the changes of the system it
can occupy new niches:
Sloman identifies
different trajectories through the design-space: Individuals
who can adapt themselves and change, go through so-called i-trajectories
. Evolutionary developments which are possible only over generations
of individuals, he calls e-trajectories . And finally there are
changes in individuals that are made from the outside (for example debugging
software) and which he calls r-trajectories (r for repair). Together these elements
result in dynamic systems which can be implemented in different ways.
For Sloman, one of
the most urgent tasks exists in specifying biological terms such as
niche, genotype etc.more clearly in order to be able to exactly understand
the relations between niches and designs for organisms. This would also
be a substantial progress for psychology:
Sloman grants that the
requirements of design-based approaches are not trivial. He names five
requirements which such an approach should fulfill:
A design-based approach
does not necessarily have to be a top-down approach. Sloman believes
that models which combine top-down and bottom-up will
be most successful. For Sloman, design-based
theories are more effective than other approaches, because:
9.2. The fundamental architecture of an intelligent system
What a design-based
approach sketches, are architectures. Such an architecture describes which states and processes are
possible for a system which possesses this architecture. From
the quantity of all possible architectures, Sloman is particularly interested
in a certain class: "..."high
level" architectures which can provide a systematic non-behavioural
conceptual framework for mentality (including emotional states)."
(Sloman, 1998a, p. 1) Such a framework for mentality
An
architecture for an intelligent system consists, according to Sloman, of four
substantial components: several functionally
different layers, control states, motivators and filters as well as a global
alarm system. 9.2.1. The layers
Sloman postulates that
every intelligent sytem possesses three layers:
The reactive layer is the
evolutionary oldest, and there is a multitude of organisms which only
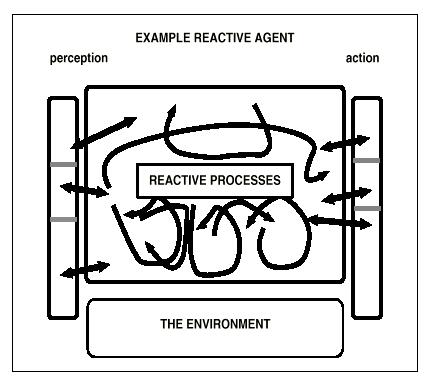
possess this layer. Schematically,
a purely reactive agent presents itself as follows:
Fig. 13: Reactive architecture (Sloman, 1997a,
p. 5) A reactive agent can make
neither plans nor develop new structures.
It is optimized for special tasks;
with new tasks, however, it cannot cope. What it is missing in flexibility, it gains at speed. Since almost all processes are clearly
defined, its reaction rate is high.
Insects are, according to Sloman, examples for such purely reactive
systems, which prove at the same time that the interaction of a number of
such agents can produce astonishingly complex results (e.g. termite
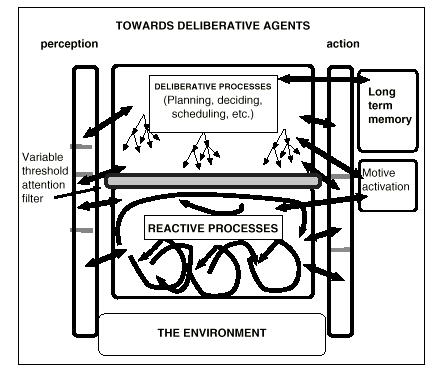
towers). A second,
phylogenetically younger layer gives an agent more qualities by far. Schematically, this looks as follows:
Fig. 14: Deliberative architecture (Sloman,
1997a, p. 6) A
deliberative agent can re-combine its action repertoire arbitrarily, develop
plans and evaluate them before execution.
An essential condition for this is a long-term memory in order to
store plans not completed yet or to rest and evaluate later the probable
consequences of plans. The
construction of such plans proceedes gradually and is therefore not
a continuous, but a discrete process.
Many of the processes in the deliberative layer are of serial
nature and therefore resource-limited.
This seriality offers a number of advantages:
at any time it is clear to the system which plans have led to a success, and it can assign rewards accordingly; at the same
time, the execution of contradicting plans is prevented; communication with the long term storage
is to a large extent error free. Such a resource-limited
subsystem is of course highly error-prone. Therefore filtering processes with variable
thresholds are necessary, in order to guarantee the working of the system
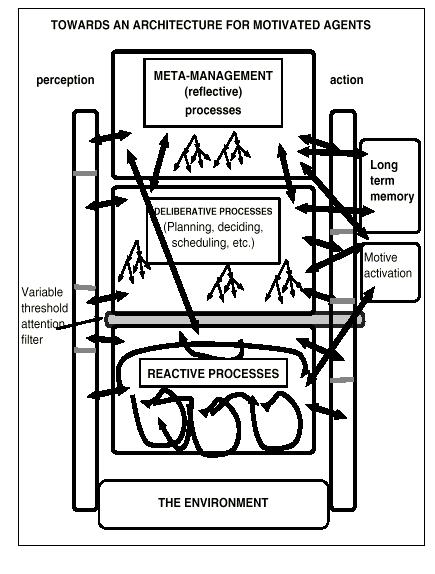
(see below). The
phylogenetically youngest layer of the system is what Sloman calls the meta
management: Fig. 15: Meta management architecture (Sloman,
1997a, p. 7) This
is a mechanism which monitors and evaluates the internal processes of
the system. Such a subsystem
is necessary to evaluate the plans and strategies developed by the deliberative
layer and, if necessary, to
reject them; to recognize recurring patterns in the deliberative subsystem;
to develop long-term strategies; and to communicate effectively with
others. Sloman points
out that these three layers are hierarchical, but parallel and that they also
work parallelly. Like the overall
system, these modules possess their own architecture, which can contain
further subsystems with their own architecture. The
meta management module is everything else butperfect. This is because it does not have comprehensive access to all internal
states and processes, that control over the deliberative subsystem is
incomplete, and that the self evaluations can be based on wrong assumptions.
9.2.2. The control
states
An
architecture like the one outlined the so far contains a variety of control
states on different levels. Some
of them operate on the highest abstraction level, while others are used
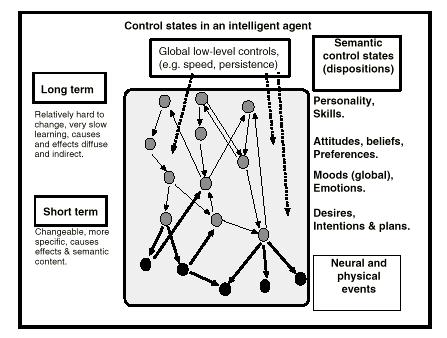
unconsciously with frequent control decisions. The following
illustration gives an overview over the control states of the system:
Fig. 16: Control states of an intelligent
system (Sloman, 1998b, p. 17) Different
control states possess also different underlying mechanisms. Some can be of chemical nature, while
others have to do with information structures. Control
states contain dispositions to react to internal or external attractions
with internal or external actions.
In the context of the overall system, numerous control states
can exists simultaneously and interact with one another. Control
states are known in Folk Psychology under numerous names: desires, preferences, beliefs, intentions,
moods etc.. By the definition
of such states through an architecture, Sloman wants to supply a "rational
reconstruction of a number of everyday mental concepts". Each
control state contains, among other things,
a structure, a transformation possibility and, if necessary,
also a semantic. Sloman illustrates
this by the example of a motivator (see below):
Additionally,
control states differ in the respect whether they can be changed easily
or only with difficulty. Many
control states of higher order, so Sloman, can be modified only in small
steps and over a longer period. Besides,
control states of higher order are more powerful and more influential
regarding the overall system than control states of a lower order. Sloman
postulates a process called circulation, by which the control states
circulate through the overall system.
Useful control states can rise upward in the hierarchy and enlarge
their influence; useless control
states can disappear from the system nearly completely.
The result
of all these processes is a kind of diffusion with which the effects
of a strong motivator distribute themselves slowly into countless and
long-lived control sub-states, up to the irreversible integration
in reflexes and automatic reactions. 9.2.3. Motivators and
filters
A
central component of every intelligent system are motivators. Sloman defines them as "mechanisms and
representations that tend to produce or modify or select between actions,
into the light of beliefs." (Sloman,
1987, p. 4). Motivators
can develop only if goals are present.
A goal is a symbolic structure (not necessarily of physical nature)
which describes a condition, which is to be achieved, received or to
be prevented. While beliefs are defined by the fact that they are representations
which adapt by perception and deliberative processes to reality, goals
are representations which elicit a behavior in order to adapt reality
to the representation. Motivators
are generated by a mechanism which Sloman calls motivator generator
or motivator generactivator.
Motivators are generated due to external or internal information
or produced by other motivators. Sloman
defines a motivator structure formally over ten fields: (1) a possible condition which can be true
or wrong; (2) a motivational
attitude towards this condition; (3)
a belief regarding this condition;
(4) an importance value;
(5) an urgency; (6)
an insistence value; (7) one or more plans; (8) a commitment status; (9) management information and (10) a dynamic
state like e.g. "plan postponed"
or "currently under consideration". In
a later work (Sloman, 1997c), Sloman extended this structure by two
further fields: (11) a rationale,
if the motivator developed from an explicit thought process as well
as (12) an intensity which specifies whether
a motivator already worked on gets further
preference over other motivators. The strength of a
motivator is determined by four variables:
Motivators compete
with one another for attention, the limited resources of the deliberative
sub-system. To make this sub-system work, there must be a mechanism
which prevents new motivators from getting attention at any time. For
this purpose the system posseses a so-called variable threshold attention
filter. The filter specifies
a threshold value a motivator must pass in order to get attentional
resources. This filter is, as already implied by its name, variable and
can be changed, for example by learning.
Sloman illustrates this by the example of a novice driver who
cannot converse with someone else while driving because he has to concentrate too much on the road. After a certain practice this is, however,
possible. The insistence of a
motivator, and thus the crucial variable for the passing of the filter, is a
quickly computed heuristic value of importance and urgency of the
motivator. If a motivator has
surfaced and thus passed the filter, several management processes
are activated. Such a management is necessary because several
motivators always pass the filter simultaneously. These processes are adoption-assessment
(the decision whether a motivator is accepted or rejected); scheduling (the decision, when a plan
is to be executed for this motivator);
expansion (developing plans for the motivator) as well
as meta-management (the decision whether and when a motivator
is to be considered at all by the management).
Sloman's attention
filter penetration theory requires a higher degree of complexity
than the theory of Oatley and Johnson-Laird.
He postulates that not every motivator interrupts the current
activity, but only such which exhibit either a high degree of insistence
or for which the appropriate attention filters are not set particularly
high.
9.2.4. The global alarm system
A
system that has to survive in an environment which changes continually
needs a mechanism with whose assistance it can react without delay to
such changes. Such a mechanism
is an alarm system. An alarm
system is not only of importance for a reactive, but likewise for a
deliberative architecture. For
example, the planning ahead can show a threat or a possibility which
can be answered immediately with a change of strategy. Sloman
draws a parallel between his alarm system and neurophysiological
findings:
The
different layers of the system are influenced by the alarm system, but in
different ways. At the same time they can also pass informations to the alarm
system and thus elicit a global alarm. 9.3.
Emotions
For Sloman, emotions are
not independent processes, but develop as emergent phenomenon from the
interaction of the different subsystems of an intelligent system. Therefore, no necessity
exists for an own "emotion module". A look at psychological emotion theories leads Sloman to the conclusion:
If one, however, views
emotions as the result of an accordingly constructed architecture, then,
according to Sloman, many misunderstandings can be cleared up. A theory which analyzes emotions in
connection with architectural concepts is for him therefore more effective
than other approachese:
The different layers of
the outlined architecture support also different emotions. The reactive layer is responsible for
disgust, sexual arousal, startle and fear
of large, fast approaching objects. The deliberative layer is
responsible for frustration through failure, relief through danger avoidance,
fear of failure or pleasant surprise by a success. The meta-management layer supports shame, degradation, aspects
of mourning, pride, annoyance. Sloman's approach
intentionally disregards physiological accompaniments of emotions. For him these are only peripheral
phenomena:
Sloman also does not
accept the objection that emotions are inseparably connected with bodily
expressions. He counters with the
argument that these are only
"relics of our
evolutionary history" which are not essential for emotions. An emotion derives its meaning not from
the bodily feelings which accompany it, but from its cognitive content:
He argues in a similar way
regarding a number of non-cognitive factors which could play a role
with human emotions, for example chemical or hormonal processes. He asks whether the affective states elicited
by such non-cognitive mechanisms are really so different from those
which are produced by cognitive processes:
How, then, do emotions develop
in Sloman's intelligent system? Basically,
he differentiates between three classes of emotions which correspond
to the three layers of his system. On the one hand, emotions can develop through internal processes
within each of these layers; on
the other hand by interactions between the layers. Emotions are accompanied
frequently by a state which Sloman calls perturbance. A perturbance is given if the overall system
is partially out of control. It
arises whenever a rejected, postponed, or simply undesirable motivator
emerges repeatedly and thus prevents or makes more difficult the management
of more important goals. Of crucial importance here
is the insistence value of a motivator which for Sloman represents a
dispositional state. As such
a highly insistent motivator can elicit perturbances even then if it
has not yet surpassed the filter or is not yet worked on actively.
Perturbances can be occurrent
(attempt to attain control over attention) or dispositional (no attempt
to attain control over attention). Perturbant states
differ by several dimensions: Duration,
internal or external source, semantic content, kind of disruption, effect
on attentional processes, frequency of disruption, positive or negative
evaluation, development of the state, fading away of the state etc.. Perturbances are, like
emotions, emergent effects of mechanisms whose task it is to do something
else. They result from the
interaction of
For the emergence of perturbances,
one thus does not require a separate "perturbance mechanism"
in the system; also questions
about the function of a perturbant state are not meaningful from this
point of view. Perturbances, however, are not to be equated with emotions;
they are rather typical accompaniments of states which are generally
called emotional. For Sloman, emotional
states are, in principle, nothing else than motivational states caused by
motivators.
A further characteristic
of emotional states consists in the production of new motivators. If, for example, a first emotional state
resulted from a conflict between a belief and a motivator, new motivators
can develop which lead to new conflicts within the system. 9.4.
The implementation of the theory in MINDER1
Sloman and his working group
have developed a working computer model named MINDER1 in which his architecture
is partly implemented. MINDER1
is a pure software implementation; there is thus no crawling room with real robots. The model is described here very shortly; a detailed description can be found in [Wright and Sloman, 1996].
MINDER1 consists of
a kind of virtual crawling room in which a virtual nanny (the minder)
has to watch out for a number of virtual babies.
These babies are "reactive minibots" which always move
around in the crawling room and are threatened by different dangers: they can fall into ditches and be damaged
or die; their batteries can
run dry, thus they have to get to a recharging station;
if the batteries are too much emptied, they die;
overpopulation of the crawling room turns some babies into rowdies
which damage other babies; damaged
babies must be brought into the hospital ward to be repaired; if the damage is too great, the baby dies.
The minder
now has different tasks: It
must ensure that the babies lose no energy, that they do not fall into
a ditch or are threatened by other dangers.
For this purpose it can build, for example, fences to enclose the babies
therein. It must lead
Minibots whose energy level is dangerously low to a recharging station
or others away from a ditch as far as possible.
This
variety of the tasks ensures that the minder must always produce new
motives, evaluate them and act accordingly.
The more Minibots enter the crawling room, the less the efficiency
of the minder. The architecture
of MINDER1 corresponds to the basic principles described above.
It consists of three subsystems which contain themselves a number
of further subsystems. 9.4.1.
The reactive sub-system
The reactive sub-system
contains four modules: Perception,
belief maintenance, reactive plan execution, and preattentive
motive generation. The perception subsystem
consists of a data base which contains only partial information about
the environment of the minder. The
system functions within a certain radius around the minder, but can
not detect, for example, hidden objects.
An update of the data base looks as follows:
[new_sense_datum time 64 name minibot4
type minibot status alive distance 5.2 x 7.43782 y 12.4632 id 4 charge 73
held false] This means: Information at time 64 about the minibot
named minibot4: It lives, is
situated at a distance of 5.2 units from the minder, has the ID 4 and
the charge 73 and is not held by another agent.
The belief maintenance
subsystem receives its information on the one hand from the informations
of the perception subsystem, on the other hand from a belief data base
in which, for example, is stored that fences are things with which one
can secure a ditch. In order to delete wrong beliefs from the
system, every belief is assigned a
defeater. If the defeater is evaluated as true,
then the respective belief is deleted from the respective data base.
An example: [belief time 20 name
minibot8 type minibot status alive distance 17.2196 x 82.2426 y 61.2426 id 8
charge 88 held false [defeater [[belief == name minibot8
== x ?Xb y ?Yb ==] [WHERE
distance(myself.location, Xb,Yb) < sensor_range] [NOT new_sense_datum ==
name minibot8 ==]]]] The defeater in
this case means: "IF I possess a
belief regarding minibot8 AND I have no new perception data of minibot8 AND I
am at a position, in which I should
have according to my belief
new perception data of minibot8 THEN my belief is wrong." The subsystem of the
reactive plan execution is necessary, so that the minder can react fast to
changing external conditions. If it
has the plan, for example, to move from one position in the crawling room to
another, then this plan should be executed without using too many resources. To achieve this, MINDER1
uses a method which was developed by Nilsson (1994) and is called teleo-reactive
(TR) program formalism. MINDER1
has thirteen of such TR programs which enable it, for example, to look
for objects or to manouvre in the room. In order to use TR programs, the minder first needs to have goals. These are produced by the subsystem for pre-attentive motive generation which consists of a set of generactivators. An example is the generactivator G_low_charge, which searches through the belief database after information about babies with low charge. If it finds such an information, it forms from it a motive and deposits it in the motive data base. An example: [MOTIVE motive [recharge minibot4] insistence 0.322 status sub] The status sub
denotes that the motive has not yet passed the filter. MINDER1 contains
eight generactivators which express its different concerns. 9.4.2. The deliberative
sub-system
The deliberative sub-system
of MINDER1 consists of the modules filter, motive management, and plan
excution. All these modules
are shallow, thus possess little depth of detail.
The filter threshold in
MINDER1 is a real number between 0 and 1.
A motivator with the status sub can pass it, if its insistence
value is higher than the value of the filter threshold. The status of the motivator
then changes from sub to surfacing. A motivator which does not succeed in passing the filter during
a time cycle, can be sent back by the generactivator with a newly computed insistence
value. All motivators which have
passed the filter are processed by the motive management and receive the
status surfaced. The motive management works with the three
modules deciding, scheduling, and expanding. The module "deciding"
specifies whether the motivator is to be worked on immediately or later. If it is processed directly, it receives the
status active; if it is processed
later, it receives the status suspended. Such a decision is possible
mostly only then if the motivator has been submitted to a closer inspection,
This is done by the module "expanding". The motivator is expanded
in a way that it contains a meta plan. An example: [MOTIVE motive [save ditch1 minibot5]
insistence 0.646361 status active] is partially expanded to:
[MOTIVE motive [save
ditch1 minibot5] insistence 0.646361 status active plan [[decide]
[get_plan]] trp [stop] importance undef] The steps decide
and get_plan of the meta plan are calls for management processes.
From the module "expanding"
the motivator can be executed directly (status: executed), a stored plan can be called up (status: active, meta), or the motivator
can be passed on to the module "deciding" (status: active, meta). In
the module "deciding", the active motivator is submitted to
a routine which specifies its importance.
This importance is determined heuristically from the insistence
value; the determination of the urgency of a motivator
is not yet implemented in MINDER1.
As a result, it can either be rejected (status:
suspended, meta) or processed further (status:
active, meta).
Finally, the
subsystem of plan execution is implemented in a set of TR programs which can call
up other TR programs. MINDER1 contains
nine action primitives. 9.4.3. The meta-management
sub-system
The meta-management
sub-system of MINDER1 contains two modules:
the change of the filter threshold value and the discovery of
perturbant states. The filter threshold
value module observes the number of motivators which succeed in passing
the filter. If they are more than three, the threshold value is raised until
only three or fewer motivators are processed. Motivators with the status suspended which have already
been processed, are assigned the status sub again if their insistence
value is lower than the threshold value of the filter. Only if less than three motivators are worked upon, the threshold
value is lowered again. The interaction of
this module and the generactivators which compute the insistence values
of the motivators anew, results in a continuous movement of the motivators from the pre-attentive into the attentive
state and back. The system is, in
this form, not yet able to produce perturbances.
Sloman speaks in connection with MINDER1 therefore of "proto-perturbances". In order to produce proto-perturbances, Sloman
uses a trick which becomes necessary by the lack of complexity of the
system. Motivators which refer
to damaged minibots (baby), receive per definitionem a high insistence
value; the management processes however assign a
lower degree of importance to these motivators - thus a deviation from
the normal behaviour of the management processes, during which importance
is evaluated according to the insistence. The respective module in
the meta-management sub-system was designed in such a way that it calculates
the rate of rejection of motivators.
If this value passes a certain threshold, then a proto-perturbant state
has occurred. MINDER 1 does indeed show
such proto-perturbances. However, the
sub-system cannot deal further with this information; for this, the entire
system is not yet developed enough. 9.5. Summary and evaluation
Sloman's
theoretical approach is certainly one of the most interesting regarding
the development of emotional computers.
It is less his specific interest in emotions but rather his stressing
of the architecture which opens up new perspectives.
Sloman
follows through theoretically most consistently what others had speculated
about as well: that there is
no fundamental difference between emotion and cognition. Both are aspects of control structures of
an autonomous system. A
detailed view of Sloman's work from 1981 to 1998, however, shows a number of ambiguities. For example, the differentiation between
the terms goal, motive, and motivator is not clear,
because they are used by him quite interchangeably. Also
it does not become clear what function perturbances have exactly with the emergence of emotions and how they
are connected with the global alarm system postulated by him. It is interesting that in his earlier work this alarm system is scarcely mentioned,
but mainly perturbances; in
his later work one finds nearly the opposite. The proof
which Sloman wanted to deliver with MINDER1 is, in its present form, not
convincing. Neither do perturbances develop
from the interaction of the elements of the system (the programmers had to
help a lot to produce even proto-perturbances), nor can one draw from it far-reaching
conclusions about human emotions. It
is nevertheless the theoretical depth and width of Sloman's work which
can lend new impulses to the study of the emotions.
His combination of design-oriented approach, theory of evolution
and discussion of virtual and physical machines is deeper than all other
approaches for the construction of autonomous agents.
Next Previous Table of content
|
|